Modul 2 PWM, ADC dan Interrupt
1. Pendahuluan[Kembali]
2. Tujuan[Kembali]
- Memahami prinsip kerja PWM pada mikrokontroler
- Memahami prinsip kerja ADC pada mikrokontroler
- Menggunakan PWM dan ADC pada Arduino
3. Alat dan Bahan[Kembali]











4. Dasar Teori[Kembali]



Potensiometer preset atau trimmer adalah potensiometer tipe "set-and-forget" kecil yang memungkinkan penyesuaian yang sangat halus atau sesekali mudah dilakukan ke rangkaian, (misalnya untuk kalibrasi). Potensiometer preset putar satu putaran adalah versi mini dari variabel resistor standar yang dirancang untuk dipasang langsung pada papan rangkaian tercetak dan disesuaikan dengan menggunakan obeng berbilah kecil atau alat plastik serupa.


- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :







Motor DC



Motor Servo

Motor servo adalah jenis motor listrik yang dirancang untuk memberikan output yang presisi dalam menyelesaikan pergerakan tertentu. Motor ini dilengkapi dengan kontroler yang memungkinkan presisi tinggi dalam mengatur posisi atau sudut rotor. Prinsip kerja motor servo didasarkan pada umpan balik atau feedback yang terus-menerus dari posisi rotor.
Prinsip kerja motor servo:
1. Umpan Balik (Feedback): Motor servo menggunakan sensor umpan balik, seperti potensiometer, enkoder, atau resolver, untuk terus memonitor posisi atau sudut rotor.
2. Kontroler:
- Kontroler servo menerima sinyal perintah untuk mencapai posisi tertentu.
- Kontroler membandingkan posisi aktual (yang diberikan oleh sensor umpan balik) dengan posisi yang diminta.
3. Error Signal:
- Jika terdapat perbedaan antara posisi aktual dan yang diminta, tercipta sinyal kesalahan (error signal).
4. Sinyal Penggerak (Drive Signal):
- Kontroler menghasilkan sinyal penggerak yang disesuaikan berdasarkan error signal.
- Sinyal penggerak mengontrol daya yang disuplai ke motor untuk mengoreksi perbedaan posisi.
5. Pergerakan Presisi:
- Motor servo merespons dengan mengubah posisi rotor untuk mengurangi error posisi.
- Proses ini berlanjut sampai posisi yang diminta tercapai.
Motor servo sering digunakan dalam aplikasi yang membutuhkan presisi tinggi, seperti robotika, peralatan CNC (Computer Numerical Control), peralatan audio profesional, dan banyak lagi. Keunggulan motor servo meliputi kemampuan untuk mengontrol kecepatan, torsi, dan posisi dengan sangat presisi, membuatnya ideal untuk aplikasi yang memerlukan akurasi dan kontrol yang tinggi.
3. Komponen Lainnya
Arduino
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang didalamnya terdapat utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggungakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Arduino Uno
Bagian-bagian arduino uno:
- Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
- Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
- Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
- Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
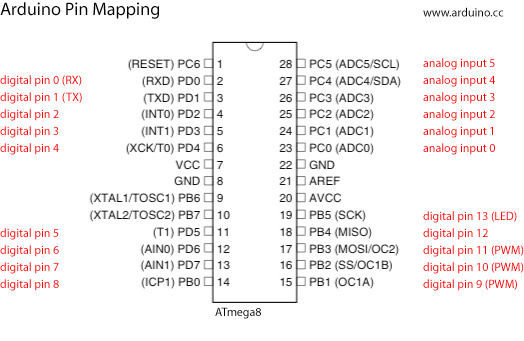
- Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika (0 atau 1). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
- Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu, dsb, dan mengubahnya menjadi nilai digital.
- LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian - bagian pendukung:
- RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
- ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:

Block diagram dapat digunakan untuk memudahkan / memahami bagaimana kinerja dari mikrokontroler ATMega 328P.
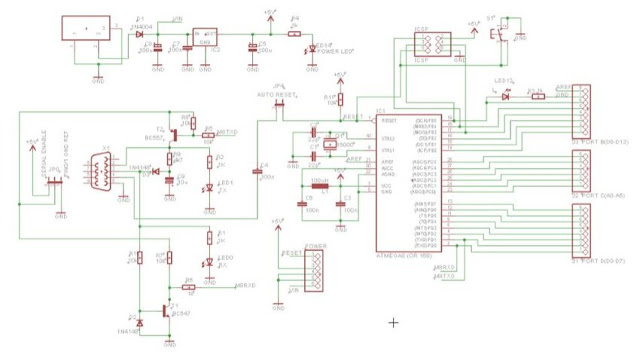
Rangkaian Mikrokontroler ATMega 328P pada Arduino UNO

- Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
- Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
- Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
- Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
- Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.






Tidak ada komentar:
Posting Komentar