TUGAS BESAR
"Kontrol Robot Pramusaji"
[KEMBALI KE MENU SEBELUMNYA]
- mengetahui bentuk rangkaian aplikasi untuk kontrol robot pramusaji menggunakan sound sensor, sensor LDR, sensor PIR, sensor touch, dan sensor flame
- Dapat mengaplikasikan rangkaian Encoder decoder dan flip-flop pada aplikasi tugas besar
- Memenuhi tugas dari Pak Darwison di kelas Sistem Digital
ALAT
1. Power Supply
1. Daya listrik (Power supply): Ini mengacu pada daya yang diberikan oleh sumber listrik ke peralatan elektronik. Daya ini diukur dalam watt (W). Spesifikasi daya listrik mencakup tegangan input yang diperlukan (misalnya 110V atau 220V AC) dan frekuensi (misalnya 50Hz atau 60Hz).
2. Konsumsi daya (Power consumption): Ini adalah jumlah daya yang dikonsumsi oleh peralatan elektronik saat beroperasi. Konsumsi daya juga diukur dalam watt (W) dan umumnya dicantumkan dalam spesifikasi produk. Informasi ini membantu untuk mengetahui berapa banyak daya yang diperlukan oleh peralatan tersebut dan mempengaruhi kebutuhan daya listrik yang dibutuhkan.
3. Daya output (Power output): Jika Anda merujuk pada peralatan yang menghasilkan daya, seperti power amplifier atau power bank, spesifikasi power output akan memberikan informasi tentang daya yang dihasilkan oleh perangkat tersebut. Ini juga diukur dalam watt (W) dan mungkin mencakup spesifikasi daya maksimum dan daya kontinu yang dapat dihasilkan.
2. Voltmeter DC
1. Rentang pengukuran: Ini mengacu pada rentang tegangan yang dapat diukur oleh voltmeter. Misalnya, voltmeter mungkin memiliki rentang pengukuran antara 0 hingga 10 volt atau 0 hingga 1000 volt
2. Akurasi: Ini adalah tingkat ketepatan voltmeter dalam mengukur tegangan. Akurasi biasanya dinyatakan dalam persentase kesalahan maksimum. Sebagai contoh, voltmeter mungkin memiliki akurasi ±1% yang berarti kesalahan maksimum yang mungkin terjadi adalah 1% dari nilai yang diukur.
3. Resolusi: Resolusi mengacu pada jumlah digit yang ditampilkan pada voltmeter. Resolusi yang lebih tinggi berarti voltmeter dapat menampilkan angka yang lebih rinci. Sebagai contoh, voltmeter dengan resolusi 3 digit dapat menampilkan angka hingga tiga angka di belakang koma.
4. Impedansi input: Ini adalah resistansi internal voltmeter terhadap arus listrik yang melewati alat. Impedansi input yang lebih tinggi pada voltmeter memungkinkan pengukuran tegangan yang lebih akurat tanpa mengganggu sirkuit yang sedang diukur.
5. Jenis input: Voltmeter dapat dirancang untuk mengukur tegangan searah (DC) atau tegangan bolak-balik (AC). Beberapa voltmeter juga dapat mengukur kedua jenis tegangan.
3. Battery
Spesifikasi :
- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Input current: dc 14a
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr
BAHAN
1. Resistor
Spesifikasi :Resistance (ohms) : 10K, 500K
Power (Watts) : 0.25W, 1/4W
Tolerance : -+ 5%
Packaging : Bulk
Composition : Carbon Film
Temperature Coefficient : 350 ppm/C
Lead free status : Lead free
RoHS status : RoHS Compliant
2. Dioda
Spesifikasi :
- Package Type : Available in DO-41 & SMD package
- Diode TYpe : Silicon rectifier general usage diode
- Max repetitive reverse voltage : 1000 volts
- Average Fwd Current : 1000 mA
- Non-repetitive max Fwd current : 30A
- Max power disipation : 3 W
- Max storage & operating temperature should be : -55 to +175 Centigrade
3. Transistor
Spesifikasi :
- Jenis Paket: TO-92
- Jenis Transistor: NPN
- Arus Kolektor Maks (IC): 100mA
- Tegangan Kolektor-Emitor Maks (VCE): 45V
- Tegangan Kolektor-Basis Maks (VCB): 50V
- Tegangan Basis Emitor Maks (VEBO): 6V
- Disipasi Kolektor Maks (Pc): 500 miliWatt
- Frekuensi Transisi Maks (ft): 300 MHz
- Penguatan Arus DC Minimum & Maksimum (hFE): 110 – 800
- Penyimpanan Maks & Suhu Pengoperasian Harus: -65 hingga +150 Celcius
4. D Flip-Flop
Tabel kebenaran
5. Relay
Spesifikasi :
- Tegangan pemicu (tegangan kumparan) 5V
- Arus pemicu 70mA
- Beban maksimum AC 10A @ 250 / 125V
- Maksimum baban DC 10A @ 30 / 28V
- Switching maksimum
6. Motor DC
Spesifikasi
- Standard 130 Type DC motor
- Operating Voltage: 4.5V to 9V
- Recommended/Rated Voltage: 6V
- Current at No load: 70mA (max)
- No-load Speed: 9000 rpm
- Loaded current: 250mA (approx)
- Rated Load: 10g*cm
- Motor Size: 27.5mm x 20mm x 15mm
- Weight: 17 grams
7. OP-Amp LM741
(Inverting Amplifier)(Non Inverting Amplifier)
Spesifikasi
- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau VOO = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
8. Gerbang NOT
9. Potensiometer
Spesifikasi
- Standard 130 Type DC motor
1. Nilai Resistansi: Spesifikasi ini mencantumkan nilai resistansi potensiometer. Nilai resistansi dapat bervariasi, misalnya, potensiometer 10K memiliki resistansi 10.000 ohm (10 kiloohm). Nilai resistansi ini menentukan rentang resistansi yang dapat disesuaikan oleh potensiometer.
2. Toleransi: Toleransi resistansi mengacu pada kisaran persentase di mana nilai resistansi potensiometer dapat bervariasi dari nilai yang ditentukan. Misalnya, jika potensiometer memiliki toleransi ±10%, maka nilai resistansi yang sebenarnya dapat berbeda hingga 10% dari nilai yang ditentukan.
3. Daya nominal: Ini adalah daya maksimum yang dapat ditangani oleh potensiometer tanpa merusak komponen. Daya biasanya diukur dalam watt (W) dan memberikan gambaran tentang seberapa besar potensiometer dapat menangani arus listrik tanpa mengalami overheating atau kerusakan.
4. Jenis Potensiometer: Ada beberapa jenis potensiometer yang tersedia, termasuk potensiometer linier dan potensiometer logaritmik (log potensiometer). Jenis potensiometer ini memiliki kurva resistansi yang berbeda saat putaran atau penggeseran digunakan.
5. Jumlah Putaran: Potensiometer dengan lebih dari satu putaran memberikan presisi yang lebih tinggi dalam mengatur resistansi. Jumlah putaran biasanya dinyatakan dalam putaran lengkap atau putaran parsial (misalnya, 1 putaran, 10 putaran, 270 derajat, dll.).
10. Encoder IC 74147
Konfigurasi :
11. Decoder IC 74247
spesifikasi :
12. Seven Segment Anoda
Spesifikasi
- Available in two modes Common Cathode (CC) and Common Anode (CA)
- Available in many different sizes like 9.14mm,14.20mm,20.40mm,38.10mm,57.0mm and 100mm (Commonly used/available size is 14.20mm)y
- Available colours: White, Blue, Red, Yellow and Green (Res is commonly used)
- Low current operation
- Better, brighter and larger display than conventional LCD displays.
- Current consumption : 30mA / segment
- Peak current : 70mA
13. LED
Spesifikasi
- Superior weather resistance
- 5mm Round Standard Directivity
- UV Resistant Eproxy
- Forward Current (IF): 30mA
- Forward Voltage (VF): 1.8V to 2.4V
- Reverse Voltage: 5V
- Operating Temperature: -30℃ to +85℃
- Storage Temperature: -40℃ to +100℃
- Luminous Intensity: 20mcd
Konfigurasi Pin
- Pin 1 : Positive terminal of LED
- Pin 2 : Negative terminal of LED
14. Sensor Sound
Spesifikasi
- Working voltage: DC 3.3-5V
- Adjustable Sensitivity
- Dimensions: 32 x 17 mm
- Signal output indication
- Single channel signal output
- With the retaining bolt hole, convenient installation
- Outputs low level and the signal light when there is sound
- Output in the form of digital switching outputs (0 and 1 high and low)
16. Sensor PIR
Spesifikasi
- Tegangan: 5V-20V
- Konsumsi daya: 65 mA
- TTL output: 3,3 V, 0V
- Waktu tunda: dapat disesuaikan (.3->5 menit)
- Waktu penguncian: 0,2 detik
- Metode pemicu: l - nonaktifkan pemicu berulang, H aktifkan pemicu berulang
- Rentang penginderaan: kurang dari 120 derajat, dalam jarak 7 meter
- Suhu: -15 ° ~ 70
- Dimensi: 32*24 mm, jarak antara sekrup 28mm, M2, Dimensi lensa diameter: 23mm
17. Sensor LDR
Spesifikasi
- Tegangan maksimum (DC): 150V
- Konsumsi arus maksimum: 100mW
- Tingkatan Resistansi/Tahanan : 10Ω sampai 4.100KΩ
- Puncak spektral: 540nm (ukuran gelombang cahaya)
- Waktu Respon Sensor : 20ms – 30ms Suhu operasi: -30° Celsius – 70° Celcius
18. Sensor Touch
Spesifikasi
- Tegangan kerja : 2v s/d 5.5v (optimal 3V)
- Output high VOH : 0.8 VCC (typical)
- Output low VOL : 0.3 VCC (max)
- Arus Output Pin Sink (@ VCC 3V, VOL 0.6V) : 8 mA
19. Sensor Flame
Spesifikasi
- Keluaran = Digital (D0)
- Output Digital: 0 dan 1
- Tegangan operasi: 3.3V hingga 5V
- Format keluaran: Output digital (TINGGI / RENDAH) Arus Output Pin Sink (@ VCC 3V, VOL 0.6V) : 8 mA
- Rentang deteksi panjang gelombang: 760nm hingga 1100nm
- Menggunakan komparator LM393
- Sudut deteksi: sekitar 60 derajat
- Sensitivitas yang dapat disesuaikan melalui potensiometer
- Arus Keluaran Maksimum: 15 mA
- Indikator lampu LED: daya (merah) dan output switching digital (hijau)
- Api yang lebih ringan mendeteksi jarak 80cm
1. Resistor
Resistor adalah komponen elektronika pasif yang memiliki nilai resistansi atau hambatan tertentu yang berfungsi untuk membatasi dan mengatur arus listrik dalam suatu rangkaian elektronika. Satuan Resistor adalah Ohm (simbol: Ω) yang merupakan satuan SI untuk resistansi listrik. Resitor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm (V = I.R ).
Cara menghitung nilai resistor
Perhitungan untuk resistor dengan 4 gelang warna
- Masukkan angka langsung dari kode warna gelang ke-1 (pertama)
- Masukkan angka langsung dari kode warna gelang ke-2
- Masukkan Jumlah nol dari kode warna gelang ke-3 atau pangkatkan angka tersebut dengan 10 (10^n)
- Gelang ke 4 merupakan toleransi dari nilai resistor tersebut
2. Diode
Cara kerja dioda sendiri dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
- Kondisi tanpa tegangan
Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p. Elektron-elektron tersebut akan menempati suatu tempat di sisi p yang disebut dengan holes. Pergerakan elektron-elektron tersebut akan meninggalkan ion positif di sisi n, dan holes yang terisi dengan elektron akan menimbulkan ion negatif di sisi p. Ion-ion tidak bergerak ini akan membentuk medan listrik statis yang menjadi penghalang pergerakan elektron pada dioda
- Kondisi forward bias
Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif.
- Kondisi reverse bias
Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub.
3. Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung arus (switching), stabilisasi tegangan, dan modulasi sinyal. Transistor dapat berfungsi semacam kran listrik, di mana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya. Kapasitor NPN memiliki simbol seperti gambar di bawah ini: Terdapat rumus rumus dalam mencari transistor seperti rumus di bawah ini:
Rumus dari Transitor adalah :
hFE = iC/iB
Dimana :
iC = perubahan arus kolektor:
iB = perubahan arus basis
hFE = arus yang dicapai
Karakteristik Input
Transistor adalah komponen aktif yang menggunakan aliran electron sebagai prinsip kerjanya didalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitter, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitter dan basis, dan yang lain antara kolektor dan basis. Karena itu, sebuah transistor seperti dua buah dioda yang saling bertolak belakang yaitu dioda emitter-basis, atau disingkat dengan emitter dioda dan dioda kolektor-basis, atau disingkat dengan dioda kolektor.Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
Karakteristik Output
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cutoff, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cutoff. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur terlalu besar.
Rumus-rumus transistor:
Konfigurasi Transistor:

Konfigurasi Common Base adalah konfigurasi yang kaki Basis-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Pada Konfigurasi Common Base, sinyal INPUT dimasukan ke Emitor dan sinyal OUTPUT-nya diambil dari Kolektor, sedangkan kaki Basis-nya di-ground-kan. Oleh karena itu, Common Base juga sering disebut dengan istilah “Grounded Base”. Konfigurasi Common Base ini menghasilkan Penguatan Tegangan antara sinyal INPUT dan sinyal OUTPUT namun tidak menghasilkan penguatan pada arus.
Konfigurasi Common Collector (CC) atau Kolektor Bersama memiliki sifat dan fungsi yang berlawan dengan Common Base (Basis Bersama). Kalau pada Common Base menghasilkan penguatan Tegangan tanpa memperkuat Arus, maka Common Collector ini memiliki fungsi yang dapat menghasilkan Penguatan Arus namun tidak menghasilkan penguatan Tegangan. Pada Konfigurasi Common Collector, Input diumpankan ke Basis Transistor sedangkan Outputnya diperoleh dari Emitor Transistor sedangkan Kolektor-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Konfigurasi Kolektor bersama (Common Collector) ini sering disebut juga dengan Pengikut Emitor (Emitter Follower) karena tegangan sinyal Output pada Emitor hampir sama dengan tegangan Input Basis.
Konfigurasi Common Emitter (CE) atau Emitor Bersama merupakan Konfigurasi Transistor yang paling sering digunakan, terutama pada penguat yang membutuhkan penguatan Tegangan dan Arus secara bersamaan. Hal ini dikarenakan Konfigurasi Transistor dengan Common Emitter ini menghasilkan penguatan Tegangan dan Arus antara sinyal Input dan sinyal Output. Common Emitter adalah konfigurasi Transistor dimana kaki Emitor Transistor di-ground-kan dan dipergunakan bersama untuk INPUT dan OUTPUT. Pada Konfigurasi Common Emitter ini, sinyal INPUT dimasukan ke Basis dan sinyal OUTPUT-nya diperoleh dari kaki Kolektor.
Karakteristik Input
Transistor adalah komponen aktif yang menggunakan aliran electron sebagai prinsip kerjanya didalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitter, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitter dan basis, dan yang lain antara kolektor dan basis. Karena itu, sebuah transistor seperti dua buah dioda yang saling bertolak belakang yaitu dioda emitter-basis, atau disingkat dengan emitter dioda dan dioda kolektor-basis, atau disingkat dengan dioda kolektor.
Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
Pemberian bias
Ada beberapa macam rangkaian pemberian bias, yaitu:
1. Fixed bias yaitu, arus bias IB didapat dari VCC yang dihubungkan ke kaki B melewati tahanan R seperti gambar 58. Karakteristik Output.
2.Self Bias adalah arus input didapatkan dari pemberian tegangan input VBB seperti gambar 60.
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cutoff, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cutoff. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur terlalu besar.
4. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
- Electromagnet (Coil)
- Armature
- Switch Contact Point (Saklar)
- Spring
Berikut ini merupakan gambar dari bagian-bagian Relay :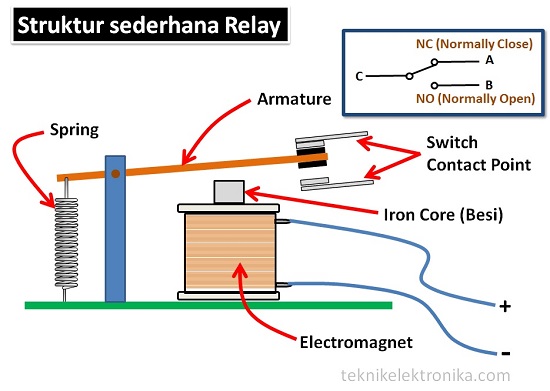
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Untuk lebih jelas mengenai Penggolongan Relay berdasarkan Jumlah Pole dan Throw, silakan lihat gambar dibawah ini :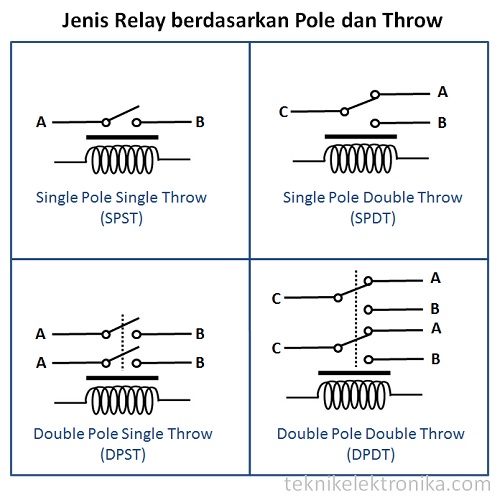
5. Buzzer
Kata buzzer sebetulnya berasal dari Bahasa Inggris, artinya bel, lonceng, atau alarm. Sedangkan pengertian buzzer secara harfiah adalah alat yang digunakan untuk atau dimanfaatkan untuk menyampaikan dan menyebarluaskan pengumuman. Jadi pada bagian ini buzzer digunakan sebagai output yaitu sebagai penanda atau sebagai bel peringatan.
6. Logic state
Gerbang Logika (Logic Gates) adalah sebuah entitas untuk melakukan pengolahan input-input yang berupa bilangan biner (hanya terdapat 2 kode bilangan biner yaitu, angka 1 dan 0) dengan menggunakan Teori Matematika Boolean sehingga dihasilkan sebuah sinyal output yang dapat digunakan untuk proses berikutnya.
Input dan Output pada Gerbang Logika hanya memiliki 2 level. Kedua Level tersebut pada umumnya dapat dilambangkan dengan :
- HIGH (tinggi) dan LOW (rendah)
- TRUE (benar) dan FALSE (salah)
- ON (Hidup) dan OFF (Mati)
- 1 dan 0
7 jenis gerbang logika :
- Gerbang AND : Apabila semua / salah satu input merupakan bilangan biner (berlogika) 0, maka output akan menjadi 0. Sedangkan jika semua input adalah bilangan biner (berlogika) 1, maka output akan berlogika 1.
- Gerbang OR : Apabila semua / salah satu input merupakan bilangan biner (berlogika) 1, maka output akan menjadi 1. Sedangkan jika semua input adalah bilangan biner (berlogika) 0, maka output akan berlogika 0.
- Gerbang NOT : Fungsi Gerbang NOT adalah sebagai Inverter (pembalik). Nilai output akan berlawanan dengan inputnya.
- Gerbang NAND : Apabila semua / salah satu input bilangan biner (berlogika) 0, maka outputnya akan berlogika 1. Sedangkan jika semua input adalah bilangan biner (berlogika) 1, maka output akan berlogika 0.
- Gerbang NOR : Apabila semua / salah satu input bilangan biner (berlogika) 1, maka outputnya akan berlogika 0. Sedangkan jika semua input adalah bilangan biner (berlogika) 0, maka output akan berlogika 1.
- Gerbang XOR : Apabila input berbeda (contoh : input A=1, input B=0) maka output akan berlogika 1. Sedangakan jika input adalah sama, maka output akan berlogika 0.
- Gerbang XNOR : Apabila input berbeda (contoh : input A=1, input B=0) maka output akan berlogika 0. Sedangakan jika input adalah sama, maka output akan berlogika 1.
7. OPAMP

Operational Amplifier atau lebih dikenal dengan istilah Op-Amp adalah salah satu dari bentuk IC Linear yang berfungsi sebagai Penguat Sinyal listrik. Sebuah Op-Amp terdiri dari beberapa Transistor, Dioda, Resistor dan Kapasitor yang terinterkoneksi dan terintegrasi sehingga memungkinkannya untuk menghasilkan Gain (penguatan) yang tinggi pada rentang frekuensi yang luas. Dalam bahasa Indonesia, Op-Amp atau Operational Amplifier sering disebut juga dengan Penguat Operasional. Terminal yang terdapat pada Simbol Op-Amp (Operational Amplifier/penguat operasional) diantaranya adalah :
- Masukan non-pembalik (Non-Inverting) +
- Masukan pembalik (Inverting) –
- Keluaran Vout
- Catu daya positif +V
- Catu daya negatif -V
Karakteristik Faktor Penguat atau Gain pada Op-Amp pada umumnya ditentukan oleh Resistor Eksternal yang terhubung diantara Output dan Input pembalik (Inverting Input). Konfigurasi dengan umpan balik negatif (Negative Feedback) ini biasanya disebut dengan Closed-Loop configuration atau Konfigurasi Lingkar Tertutup. Sedangkan pada Konfigurasi Lingkar Terbuka atau Open-Loop Configuration, besar penguatannya adalah tak terhingga (∞) sehingga besarnya tegangan output hampir atau mendekati tegangan Vcc.

8. LED

Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya. Bentuk LED mirip dengan sebuah bohlam (bola lampu) yang kecil dan dapat dipasangkan dengan mudah ke dalam berbagai perangkat elektronika. Berbeda dengan Lampu Pijar, LED tidak memerlukan pembakaran filamen sehingga tidak menimbulkan panas dalam menghasilkan cahaya. Oleh karena itu, saat ini LED (Light Emitting Diode) yang bentuknya kecil telah banyak digunakan sebagai lampu penerang dalam LCD TV yang mengganti lampu tube. LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
Keanekaragaman Warna pada LED tersebut tergantung pada wavelength (panjang gelombang) dan senyawa semikonduktor yang dipergunakannya. Berikut ini adalah Tabel Senyawa Semikonduktor yang digunakan untuk menghasilkan variasi warna pada LED :
| Bahan Semikonduktor | Wavelength | Warna |
| Gallium Arsenide (GaAs) | 850-940nm | Infra Merah |
| Gallium Arsenide Phosphide (GaAsP) | 630-660nm | Merah |
| Gallium Arsenide Phosphide (GaAsP) | 605-620nm | Jingga |
| Gallium Arsenide Phosphide Nitride (GaAsP:N) | 585-595nm | Kuning |
| Aluminium Gallium Phosphide (AlGaP) | 550-570nm | Hijau |
| Silicon Carbide (SiC) | 430-505nm | Biru |
Gallium Indium Nitride (GaInN)
|
9. Motor DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC. Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan.
Bentuk dan Simbol Motor DC

Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
10. Sensor Sound
Konfigurasi
Hubungan sensor sound dengan resistansi
Grafik respon
Prinsip Kerja :
Sensor suara adalah sensor yang cara kerjanya yaitu merubah besaran suara menjadi besaran listrik. Sinyal yang masuk akan di olah sehingga akan menghasilkan satu kondisi yaitu kondisi 1 atau 0. Sensor suara banyak digunakan dalam kehidupan sehari-hari, Contoh Pengaplikasian sensor ini adalah yang bekerja pada system robot. Suara yang diterima oleh microfon akan di transfer ke pre amp mic, fungsi pre amp mic ini adalah untuk memperkuat sinyal suara yang masuk kedalam komponen.
Setelah sinyal suara diterima oleh preamp mic, kemudian di kirim lagi ke rangkaian pengkonfersi yang mana rangkaian ini berfungsi untuk merubah sinyal suara yang berbentuk sinyal digital menjadi sinya analog agar bisa dibaca oleh mikrokontroler. Jika sinyal tersebut diterima oleh mikro kontroler maka akan diolah sesuai dengan program yang dibuat, apakah robot akan berjalan atau berhenti.
Suara yang masuk direkam oleh komponen kemudian akan disimpan oleh memory. Sebagai contoh jika kita bertepuk tangan 1 kali maka akan dikenali sebagai kondisi 1 atau on sehingga robot dapat berjalan. Jika bertepuk tangan 2 kali maka robot akan mati atau mendapat sinyal kondisi 0. Penggunaan sinyal tergantung dari user bagaimana dia menggunakannya.
Kesensitifan sensor suara dapat diatur, semakin banyak condensator yang digunakan pada pre amp maka akan semakin baik daya sensitive dari sensor suara tersebut. Begitu juga pada saat penggunaan suara harus dalam kondisi tertentu, karena jika terdapat suara lain yang masuk maka akan tidak dikenali oleh sensor, begitu pula frekuensi yang digunakan harus sesuai pada saat kita menginput suara awal dan input suara pada saat menjalankan program.
11. Sensor Touch
Berdasarkan fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya.
1) Sensor Kapasitif
Sensor sentuh Kapasitif merupakan sensor sentuh yang sangat populer pada saat ini, hal ini dikarenakan Sensor Kapasitif lebih kuat, tahan lama dan mudah digunakan serta harga yang relatif lebih murah dari sensor resistif. Ponsel-ponsel pintar saat ini telah banyak yang menggunakan teknologi ini karena juga menghasilkan respon yang lebih akurat.
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya. Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus khusus ataupun sarung khusus yang memiliki sifat konduktif.
2) Sensor resistif
sensor sentuh resistif ini tidak tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam. Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan signal ke prosesor untuk melakukan proses selanjutnya.
Konfigurasi
Grafik respon
12. Sensor LDR
LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenainya. LDR juga dapat digunakan sebagai sensor cahaya. Nilai resistansi dari LDR bergantung pada intensitas cahaya. Semakin tinggi intensitas cahaya (siang hari) yang mengenainya, maka semakin kecil nilai resistansinya. Sebaliknya semakin rendah intensitas cahaya (malam hari) yang mengenainya, maka semakin besar nilai resistansinya. Secara umum, sensor LDR memiliki nilai hambatan 200 Kilo Ohm saat intensitas cahaya rendah (malam hari) dan akan menurun menjadi 500 Ohm saat intensitas cahaya tinggi (siang hari).Umumnya sensor LDR digunakan pada rangkaian lampu otomatis pada rumah, taman, dan jalan raya.
Karakteristik sensor LDR
- Laju Recovery
Laju recovery merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K/detik, untuk LDR tipe arus harganya lebih besar dari 200K/detik(selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai den-gan level cahaya 400 lux.
- Respon Spektral
Sensor Cahaya LDR (Light Dependent Resistor) tidak mempunyai sensitivitas yang sama untuk setiap panjang gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, aluminium, baja, emas dan perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling banyak, digunakan karena mempunyai daya hantaryang baik.
13. Sensor PIR
Sensor PIR (Passive Infrared Receiver) adalah sebuah sensor yang biasa digunakan untuk mendeteksi keberadaan manusia. Sensor PIR adalah sebuah sensor yang menangkap pancaran sinyal inframerah yang dikeluarkan oleh tubuh manusia maupun hewan. Sensor PIR dapat merespon perubahan- perubahan pancaran sinyal inframerah yang dipancarkan oleh tubuh manusia.
Simbol PIR Sensor :
a. Prosedur Percobaan
1. Siapkan semua alat dan bahan yang diperlukan
2. Disarankan agar membaca datasheet setiap komponen
3. Cari komponen yang diperlukan di library proteus
4. Rangkailah Rangkaian sesuai dengan gambar dibawah
5. jika ingin mensimulasikan jangan lupa masukkan library sensor touch, sensor PIR dan sensor sound
6.Coba dijalankan rangkaian apabila ouput hidup/berputar (motor dc) maka rangkaian bisa digunakan
b. Rangkaian
Sensor sound diletakkan di telinga robot. Saat sensor sound berlogika 1 maka akan ada tegangan yang mengalir dari power supply memasuki Vcc dan Vout, dan arus dari Vout akan mengalir ke R13. Pada resistor akan terjadi pembagian tegangan yang menghasilkan tegangan sebesar 0.71 V sehingga transistor akan aktif. Aktifnya transistor menyebabkan arus dari power supply akan mengalir ke transistor dr kaki kolektor ke kaki emitor. arus yang mengalir tadi akan keluar melalui kaki emiter menuju ke kaki anoda (untuk kaki katoda nya terhubung ke vcc) dari dioda dan relay. Dikarenakan adanya arus yang mengalir pada relay maka menyebabkan relay switch akan berpindah ke kiri yang dapat secara otomatis mengalirkan arus menuju motor dan motor akan bergerak dan pergerakan motor ini menandakan bahwa kepala robot akan bergerak kearah sumber suara.

Setelah si robot menoleh kearah sumber suara, maka secara otomatis sensor PIR akan bekerja. Sensor PIR terletak pada bagian wajah dari robot. apabila sensor berlogika 1 maka tegangan dari power supply akan memasuki Vcc serta Vout. Arus dari Vout sensor PIR akan mengalir menuju R2 dan masuk ke kaki basis transistor, karena terjadi pembagian tegangan pada R2 yang menghasilkan tegangan yang memenuhi syarat aktifnya transistor maka tegangan dari power supply akan mengalur ke transistor melalui kaki kolektor dan keluar melalui kaki emitor. Arus ini akan mengalir ke decoder dan masuk ke kaki B dari decoder IC 4515 dan menghasilkan output aktif pada Q3 (sesuai tabel kebenaran kombinasi input A dan B menghasilkan output aktif Q3). GND dari sensor PIR terhubungan dan mengirimkan arus ke sensor LDR

Sensor LDR terdapat pada bagian tubuh robot, dimana sensor ini memiliki nilai hambatan yang tinggi yaitu nilai maksimalnya 10k ohm, Maka ketika sensor LDR mendeteksi cahaya yang mana tegangan akan mengalir dari power supply sebesar 5V dan masuk ke sensor LDR. Pendeteksian cahaya pada sensor LDR ini minimal 75% atau sebesar 0.73V tegangan yang mengalir didalamnya. Saat tegangan sudah mengalir maka akan masuk ke resistor dan lalu akan menghasilkan arus yang akan mengalir ke op-amp dan terus mengalir ke R3 dan terjadi pembagi tegangan yang menghasilkan tegangan sebesar 0.77 dimana besaran ini telah memenuhi syarat aktif transistor maka arus mengalir masuk ke kaki basis transistor maka transistor akan aktif. arus yang melewati transistor tadi akan mengalir menuju decoder IC 4515 dan masuk ke kaki C dan D, dimana berdasarkan tabel kebenarn dari decoder IC 4515 bahwa input C dan D akan menghasilkan output di kaki Q12.
Semua kombinasi input yang diberikan sensor sound, PIR dan LDR tadi menghasilkan output Q1,Q3,Q7 dan Q12 pada IC 4515. output aktif tersebut akan dihubungkan ke encoder IC 74147, dimana akan teruhubung ke kaki 1,3,5,7. Dimana kaki 1 akan menghasilkan output Q0, kaki 3 dan 5 = kaki Q1 dan kaki 7 = Q2 (berdasarkan rangkaian dalam dari IC 74147). Berdasarkan tabel kebenaran, output dari decoder 4515 berlogika 0. Output kaki Q0 (berlogika 0) akan mengalirkan arus yang melewati gerbang NOT sehingga hasilnya akan berlogika 1 lalu arus tadi akan masuk ke D flip-flop sehingga LED hijau akan aktif (kondisi set). Output kaki Q1 (berlogika 0) akan mengalir ke gerbang NOT sehingga menghasilkan logika 1, karena transistor telah aktif maka akan ada tegangan yang mengalir dari power supply menuju ke rellay dan masuk ke kaki kolektor dan mengalir ke kaki emitor dan menuju ground. karena aktifnya transistor maka rellay akan berpindah dari kanan kekiri yang menyebabkan tegangan mengalir dari power supply sehingga mengaktifkan motor dan kaki kanan robot dapat bergerak. Begitu juga untuk kaki Q2, dengan prinsip kerja yang serupa maka kaki kiri robot juga dapat bekerja.
Sensor touch diletakan di tangan yg akan bekerja jika ada logic 1 atau robot menerima sentuhan pada tangannya. tegangan dari power supply akan mengalir ke Vcc dan akan mengeluarkan arus pada Vout yg mempunyai tegangan sebesar 5V, arus ini akan melewati kaki non inverting op-amp, untuk cabang pertama arus yg dikeluarkan op-amp akan melewati resistor dan terjadi pembagi tegangan disana. Tegangan yang dihasilkan sebesar 0.7V dimana telah memenuhi syarat aktifnya suatu transistor oleh karena itu arus akan mengalir ke relay yang menyebabkan relay switch akan berpindah ke kiri yang dapat secara otomatis mengalirkan arus menuju motor dan motor akan bergerak. pada kondisi ini kepala robot akan bergerak menghadap arah sentuhan yang diterimanya (menghadap ke kanan jika tangan kanan yang disentuh, maupun sebaliknya). Untuk cabang lainnya dari op-amp tadi akan terhubung ke kaki A dari decoder 74247 dimana untuk kaki A bernilai 2 pangkat 0 = 1 yang dapat mengaktifkan QB dan QC sehingga seven segmentnya akan menampilkan angka 1
untuk sensor flame akan aktif saat adanya api, dimana saat terdeteksinya api maka sensor akan aktif lalu tegangan akan mengalir dari power supply ke vcc dan mengalirkan arus dari out dan diumpankan ke resistor. Setelah diumpankan akan menghasilkan tegangan sebesar 0.78 volt dimana tegangan sebesar ini dapat mengaktifkan transistor sehingga tegangan akan mengalir dari vcc menuju kaki kolektor dan menuju emitor dan mengalir ke ground. Tegangan dari vcc tadi dapat membuat relay switch sehingga ada arus yang mengalir ke motor dan robot akan membunyikan alarm sebagai bentuk peringatan adanya api.
- Video Prinsip kerja
- Video Merangkai






























.jpg)












































Tidak ada komentar:
Posting Komentar