KEYPAD AND 7-SEGMENT
1. Pendahuluan[Kembali]
2. Tujuan[Kembali]
- Memahami prinsip dasar input dan output pada mikrokontroler.
- Mampu mengonfigurasi dan mengendalikan 7-segment sebagai output pada mikrokontroler.
- Mampu menangkap dan memproses input dari keypad.
3. Alat dan Bahan[Kembali]











Spesifikasi :
4. Dasar Teori[Kembali]



.jpg)









7. Sensor Vibration



8. Motor DC
Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
9. Logic state

Input dan Output pada Gerbang Logika hanya memiliki 2 level. Kedua Level tersebut pada umumnya dapat dilambangkan dengan :
- HIGH (tinggi) dan LOW (rendah)
- TRUE (benar) dan FALSE (salah)
- ON (Hidup) dan OFF (Mati)
- 1 dan 0
7 jenis gerbang logika :
- Gerbang AND : Apabila semua / salah satu input merupakan bilangan biner (berlogika) 0, maka output akan menjadi 0. Sedangkan jika semua input adalah bilangan biner (berlogika) 1, maka output akan berlogika 1.
- Gerbang OR : Apabila semua / salah satu input merupakan bilangan biner (berlogika) 1, maka output akan menjadi 1. Sedangkan jika semua input adalah bilangan biner (berlogika) 0, maka output akan berlogika 0.
- Gerbang NOT : Fungsi Gerbang NOT adalah sebagai Inverter (pembalik). Nilai output akan berlawanan dengan inputnya.
- Gerbang NAND : Apabila semua / salah satu input bilangan biner (berlogika) 0, maka outputnya akan berlogika 1. Sedangkan jika semua input adalah bilangan biner (berlogika) 1, maka output akan berlogika 0.
- Gerbang NOR : Apabila semua / salah satu input bilangan biner (berlogika) 1, maka outputnya akan berlogika 0. Sedangkan jika semua input adalah bilangan biner (berlogika) 0, maka output akan berlogika 1.
- Gerbang XOR : Apabila input berbeda (contoh : input A=1, input B=0) maka output akan berlogika 1. Sedangakan jika input adalah sama, maka output akan berlogika 0.
- Gerbang XNOR : Apabila input berbeda (contoh : input A=1, input B=0) maka output akan berlogika 0. Sedangakan jika input adalah sama, maka output akan berlogika 1.







Konfigurasi Common Base adalah konfigurasi yang kaki Basis-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Pada Konfigurasi Common Base, sinyal INPUT dimasukan ke Emitor dan sinyal OUTPUT-nya diambil dari Kolektor, sedangkan kaki Basis-nya di-ground-kan. Oleh karena itu, Common Base juga sering disebut dengan istilah “Grounded Base”. Konfigurasi Common Base ini menghasilkan Penguatan Tegangan antara sinyal INPUT dan sinyal OUTPUT namun tidak menghasilkan penguatan pada arus.
Konfigurasi Common Collector (CC) atau Kolektor Bersama memiliki sifat dan fungsi yang berlawan dengan Common Base (Basis Bersama). Kalau pada Common Base menghasilkan penguatan Tegangan tanpa memperkuat Arus, maka Common Collector ini memiliki fungsi yang dapat menghasilkan Penguatan Arus namun tidak menghasilkan penguatan Tegangan. Pada Konfigurasi Common Collector, Input diumpankan ke Basis Transistor sedangkan Outputnya diperoleh dari Emitor Transistor sedangkan Kolektor-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Konfigurasi Kolektor bersama (Common Collector) ini sering disebut juga dengan Pengikut Emitor (Emitter Follower) karena tegangan sinyal Output pada Emitor hampir sama dengan tegangan Input Basis.
Konfigurasi Common Emitter (CE) atau Emitor Bersama merupakan Konfigurasi Transistor yang paling sering digunakan, terutama pada penguat yang membutuhkan penguatan Tegangan dan Arus secara bersamaan. Hal ini dikarenakan Konfigurasi Transistor dengan Common Emitter ini menghasilkan penguatan Tegangan dan Arus antara sinyal Input dan sinyal Output. Common Emitter adalah konfigurasi Transistor dimana kaki Emitor Transistor di-ground-kan dan dipergunakan bersama untuk INPUT dan OUTPUT. Pada Konfigurasi Common Emitter ini, sinyal INPUT dimasukan ke Basis dan sinyal OUTPUT-nya diperoleh dari kaki Kolektor.
Karakteristik Input
Transistor adalah komponen aktif yang menggunakan aliran electron sebagai prinsip kerjanya didalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitter, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitter dan basis, dan yang lain antara kolektor dan basis. Karena itu, sebuah transistor seperti dua buah dioda yang saling bertolak belakang yaitu dioda emitter-basis, atau disingkat dengan emitter dioda dan dioda kolektor-basis, atau disingkat dengan dioda kolektor.
Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
Pemberian bias Ada beberapa macam rangkaian pemberian bias, yaitu: 1. Fixed bias yaitu, arus bias IB didapat dari VCC yang dihubungkan ke kaki B melewati tahanan R seperti gambar 58. Karakteristik Output.
2.Self Bias adalah arus input didapatkan dari pemberian tegangan input VBB seperti gambar 60.
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cutoff, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cutoff. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur terlalu besar.
12. Relay

Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
- Electromagnet (Coil)
- Armature
- Switch Contact Point (Saklar)
- Spring
Berikut ini merupakan gambar dari bagian-bagian Relay :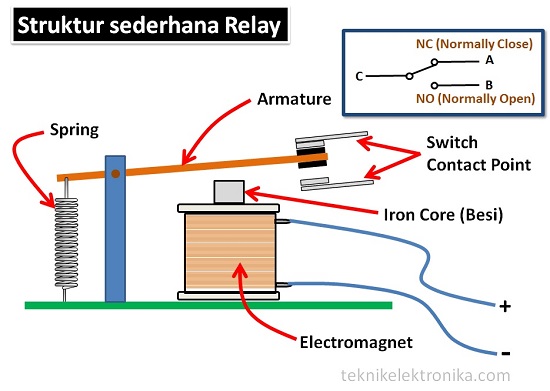
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Untuk lebih jelas mengenai Penggolongan Relay berdasarkan Jumlah Pole dan Throw, silakan lihat gambar dibawah ini :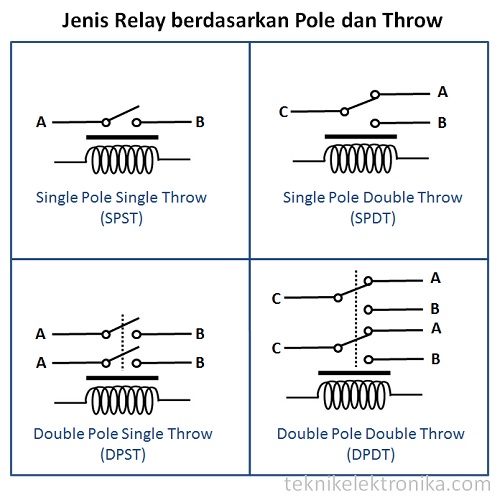
13. Buzzer
Kata buzzer sebetulnya berasal dari Bahasa Inggris, artinya bel, lonceng, atau alarm. Sedangkan pengertian buzzer secara harfiah adalah alat yang digunakan untuk atau dimanfaatkan untuk menyampaikan dan menyebarluaskan pengumuman. Jadi pada bagian ini buzzer digunakan sebagai output yaitu sebagai penanda atau sebagai bel peringatan.
12. Relay

Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
- Electromagnet (Coil)
- Armature
- Switch Contact Point (Saklar)
- Spring
Berikut ini merupakan gambar dari bagian-bagian Relay :
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Untuk lebih jelas mengenai Penggolongan Relay berdasarkan Jumlah Pole dan Throw, silakan lihat gambar dibawah ini :

Kata buzzer sebetulnya berasal dari Bahasa Inggris, artinya bel, lonceng, atau alarm. Sedangkan pengertian buzzer secara harfiah adalah alat yang digunakan untuk atau dimanfaatkan untuk menyampaikan dan menyebarluaskan pengumuman. Jadi pada bagian ini buzzer digunakan sebagai output yaitu sebagai penanda atau sebagai bel peringatan.
5. Percobaan[Kembali]
a. Prosedur[Kembali]
b. Hardware dan Diagram Block[Kembali]
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

- Sensor Flame




Tidak ada komentar:
Posting Komentar